Also known as, massively overpowering a tiny system. With 2 xbees, and 2 xbee adapter boards from adafruit, making it easy to try things out on some breadboards, it was time to get to work.
I had to get setup for embedded development again, and with orders from overseas taking a rather long time to get to Iceland, I made do with what I had on hand.
ATTiny85’s are cool little chips. Not every day you get happy little 8 pin PDIP packages that can do so much. Not many pins mind you, but still, it’s so TINY! and it’s not even surface mount!
So I got one of these set up on a board, after some basic blink testing, set about putting together “TinyTemp” probably the most outrageous wireless sensor mote ever made.
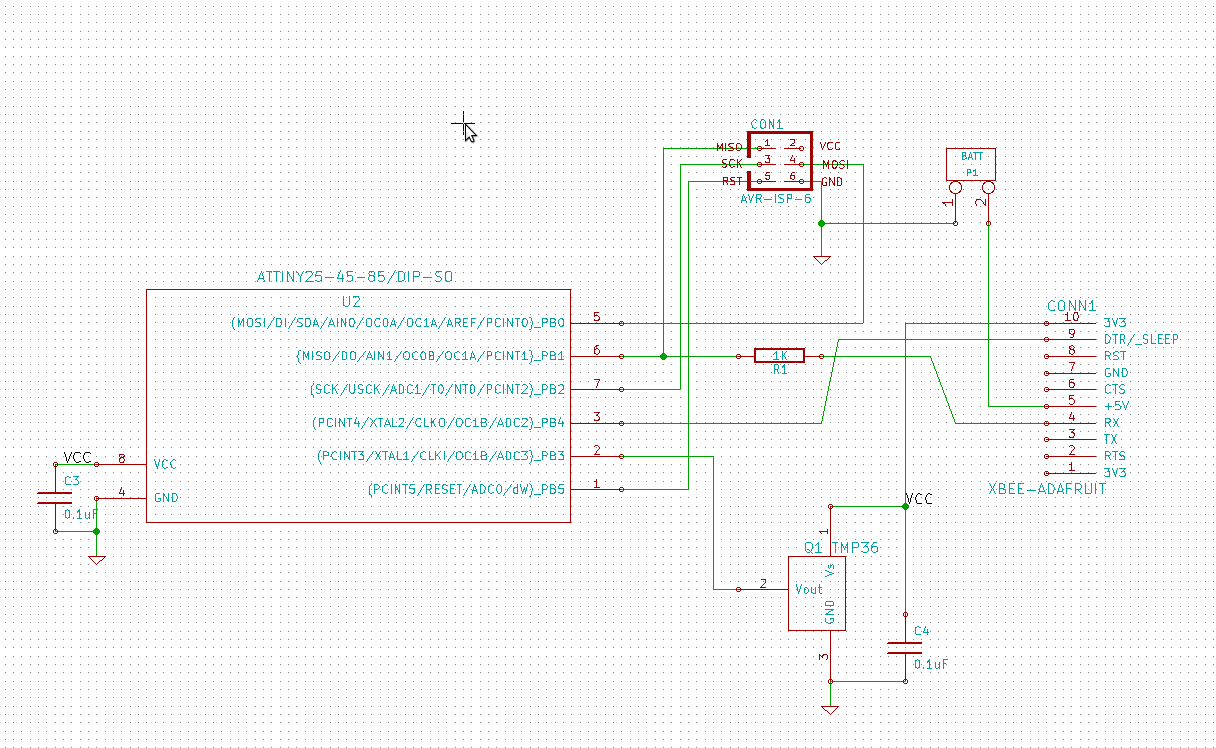
There’s lots that is “wrong” with this design. It’s ~$US35-40 in parts for starters. But, that isn’t it’s purpose. This is really just a development node. Any serious node would get done up on it’s own board, which would reduce the partcount, reduce the size, reduce the cost, improve the reliability, and certainly improve the professionalism :) (Also, [2])
It’s something that I think JeeLabs are doing slightly backwards. While I love their boards and their designs, I kind of feel that their fixed base board with extension modules is not the best permanent solution. I’m not sure it provides the best development environment for working on something better either. Or maybe I’m just jealous that he has so many good bits working already :) (Also, they’re nice and cheap!)
I’m happier with some fairly ugly prototypes on breadboards, and then getting some boards made just for that node, and nothing more. I don’t need them to be physically expandable. If it’s just a tiny, compact node that does one thing well, it should just stay as one tiny compact that does one thing well. If you need more, you get a different node, or you put two nodes at the same location.
But back to the board. I had a few goals that I wanted to explore with the board.
TX through the xbee
I only wanted to send data, and I didn’t need to be doing anything else, so I needed to get the USI module to do ordinary old UART to talk to the xbee. A bit of an adventure in software, and app notes from atmel, and counting bits in microseconds by hand Wondering why there wasn’t a reliable software uart library. Finding out that most of my problems were a very flaky serial port on one of my computers, and it was simply mangling all the data. Primary mission accomplished. [1]
power consumption
With the radio turned on, and simply using busy waiting for the 5 second interval between sensor readings, and running on 5V, at the default 8MHz, the board was sucking down ~70mA. Wayyy to much to run on batteries!
Enabling pin sleep on the xbee’s, and using up one of the valuable io pins on the tiny85 to switch the radio on and off for only long enough to send the data burst was a massive reduction. Straight down to about 20mA.
Next was actually sleeping in the AVR, instead of busy waiting, which reduced it further, but not as far as I would have liked. Then, I cut the clock down as low as it would go, so that a single timer overflow would take the entire 5 seconds. That got me down to about 5mA, which, running at 5V with a venerable, but leaky 7805, was about as good as I could get.
Until, remembering that the xbee was 3.3V max, and the adapter boards had an onboard ultra low quiescent current regulator (good job lady ada) I rerouted the battery through the adapter board, and ran the whole thing off 3.3V instead of 5. Presto. Down to 550uA
There’s a few more tricks that could be pulled yet, but that’s enough for now. (For instance, it’s _possibly_ less power to use cycling sleep on the xbee to wakeup the AVR, instead of the other way round)
Full source for the node, as well as the kicad schematic files are available in the karlnet svn repository
Now, with one real node alive and sending data, it was time to get onto some server software.
[1] There’s something very very screwy with the USB-serial connection on one of my computers. It doesn’t happen on any of the other ones, but one one, (unfortunately the one best suited to being the always on base station) The serial port seems lose a LOT of packets. This was exceptionally tedious, until I ended up with a LOT more error handling in the xbee-api mode python receiver. It will still drop packets, but now it reliably recovers within 3 packet times, before it could get some bad data and block almost forever. I’m not sure, but I feel it’s a kernel problem related to some changes in lirc usb polling rate. Kinda hard to prove though.
[2] Xbee’s actually have onboard ADCs, there’s no particular reason to put another micro on the board. Or is there? In this case, probably not, I could just use cyclic sleep with a nice long delay to get it to sample the thermometer. But, maybe not always. Cyclic sleep is still more power consumption than pin hibernate. And in a lot of cases, you might want to actually control something locally, and that’s not something you can easily do with sending pin change packets to a solitary xbee.